

服务地方经济项目之一 基于机器视觉的高速在线瓶盖检测系统
一、项目背景(意义及与国家产业政策符合情况)
近年来,随着全球制造业中心向中国的转移,中国成为继北美、欧洲与日本后的全球第四大制造业市场,同时也是最具发展潜力机器视觉市场。一方面国外跨国企业纷纷在国内设立工厂带来了极大的视觉检测系统需求;另一方面国内本土企业生产规模不断扩大对视觉检测系统的需求也开始凸现。以皇冠瓶盖为例,仅2005年一年全国就新投产37条生产线。目前,国内针对产品的表面缺陷尚无成熟的在线高速检测解决方案;国外进口的检测设备不但价格昂贵,而且使用和操作风格与国内技术人员的使用习惯均存在较大差异,不利于其大范围的推广应用。国内生产企业一般仍采用传统的、相对廉价的人工检测来进行产品表面缺陷的检测,其缺点是:(1)速度慢、效率低;(2)检测质量不稳定。在重复劳动下,人工检测容易使人疲劳,常会出现漏检现象,造成产品质量不稳定;(3)检测标准不统一。由于不同人对色彩深浅的判断标准存在个体差异,造成检测的结果存在差异;(4)检测控制周期长。以皇冠瓶盖生产为例,每分钟可生产2600个瓶盖,平均每秒43.4个瓶盖,这样高的速度,人工无法进行在线检测,而且一旦生产线出现产品质量偏差,无法及时调整,将会有大量的残次品被生产出来,造成浪费。
针对产品表面质量人工检测存在的缺陷,迫切需要一种在线智能的自动检测系统。机器视觉技术具有非接触,检测速度快,准确率高,检测结果客观可靠的特点,配合高速视觉检测在智能制造领域已有应用先例,例如意大利萨克米(SACMI)集团的CVS2500应用于皇冠瓶盖高速检测、德国ibea公司的ViS-3应用于药品包装的高速检测等,但是由于进口设备价格昂贵,且维修维护成本较高,国外的软件设计风格和操作习惯导致操作人员的学习适应过程很长,致使机器视觉检测设备对大多数国内厂商来说成为奢侈品,极大制约了高速视觉检测系统在生产领域的应用推广。因此,开发和研究具有自主知识产权的高速视觉检测系统,打破国外相关设备的垄断,突破国外技术封锁,减少对国外技术的依赖、促进本土视觉检测技术成长,改变国内中小型企业对机器视觉检测设备可望不可及的状态,提高食品包装产业智能制造设备国产化水平都具有十分重要的意义。
二、项目主要内容及技术创新点
本项目研制的主要创新点和实现的关键技术如下:
1.针对现代工业智能制造现场的分布式特征,提出了基于两层网络控制的高速视觉检测系统的结构设计,探索了高速视觉检测系统架构的网络控制理论和方法,实现并掌握了相关的关键技术。
2.针对高速运行的工业流水线上的工件,考虑机械振动、传送带的随机扰动、控制电路的电磁干扰以及电压波动造成的转速不稳定等因素,将迭代学习控制和卡尔曼滤波结合,研究并解决了在小视场约束下如何控制相机精确抓拍高速移动工件图像和精准剔除残次工件的控制难题,掌握了其关键技术。
3.针对照明光线不均匀和复杂工业现场带来的强干扰噪声图像,研究并提出了基于局部能量离散路径水平集的工件子空间快速精确定位方法。
4.针对高速智能制造生产线上的产品表面瑕疵,考虑模式背景图像中存在非模式型缺陷的情况,根据产品图像具有随机旋转的特点,研究旋转不变、平移不变和尺度不变特征高速匹配算法,解决了复杂图像表面瑕疵高速检测的难题,并掌握其关键技术。
5. 针对高速智能制造生产线生产速度快、生产品种多等特点,设计和开发了具有自适应学习功能的图像识别智能学习软件系统,对已有图像进行特征提取和特征分类,利用专家系统和聚类算法对新特征进行学习记忆。
6.针对工业智能制造高速生产线的运行特点,基于系统硬件结构和算法的研究,研制了应用于工业现场的皇冠瓶盖高速视觉检测系统。

图1皇冠瓶盖机器视觉检测设备在定中机械公司现场测试,
图中标示出视觉检测设备的安装位置。
图2研究人员在佛山永信制盖公司车间与瓶盖生产技术人员
在中心研发的机器视觉检测设备前合影。
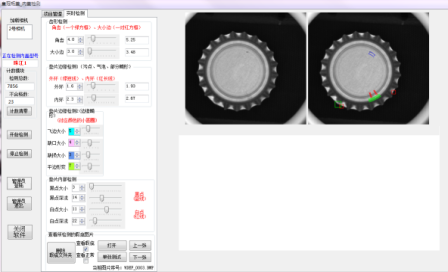
图3机器视觉皇冠瓶盖内盖在线检测软件界面
三、项目产业化基础及市场前景
该项目开发了自主研究的算法,检测时间和精度达到了生产线要求,每秒50个瓶盖的瑕疵检测和次品剔除速度,指标领先国内同类产品,并达到国际先进水平。本研究成果打破了国外垄断,填补了皇冠瓶盖高速在线检测的国内空白,满足了国内中小型企业对高速机器视觉检测设备的迫切需求。目前在该成果不仅在广东、山东、浙江、内蒙等获得成功应用,而且远销埃塞俄比亚、坦桑尼亚,截止到2015年12月共检测瓶盖64.9168亿只。同时,相关技术和关键设备还可以推广到O形密封圈、陶瓷密封圈、医药等多种产品和领域的高速在线检测中,在智能制造领域具有普遍的适用性和重要的推广应用价值。
四、项目团队及成员详细介绍(每个人的学历、职称、研究方向和领域、承担的项目情况)
周文举,团队负责人,博士,副教授。2014年3月至2016年4月受聘英国埃塞克斯大学(University of Essex)计算机与电子工程系研究员,担任机器人资深工程师。2016年4月回国,现就职于鲁东大学信息与电气工程学院。长期从事机器视觉、人工智能和机器人技术领域的研究,主要研究包括机器学习、模式识别、运动控制、机器人定位与自动导航、无人机技术、工业高速视觉检测技术等。
承担的主要项目:
1. 国家科技部重大仪器专项子课题,2012YQ15008702,菌落光学成像模式识别技术及部件,2012/10-2016/09, 500万元,已结题,参加。
2. 国家自然科学基金面上项目,61473282,融合视觉多信息的网络化控制系统研究,2015/01-2018/12,81万元,在研,参加。
3. 上海市经信委高新技术产业化重点项目,11XI-32,网络化智能高端印刷机控制系统,2011/11-2013/11,80万元,已结题,参加。
4. 英国国家科技资助项目,KTP9297,Knowledge Transfer Partnerships (KTP) for Robotic Location and Camera Tracking,2014/03-2016/04,62万磅,已结题,主持。
5. 广东佛山定中机械有限公司委托项目,皇冠瓶盖视觉检测系统研制,2010/12-2012/04,33万元,已结题,主持。
6.河北衡水毅智创新科技有限公司委托项目,2016HX040,基于视觉的3D建模机器人智能喷漆系统,2016/10-2017/02,25万元,在研,主持。
刘慧霞,博士,副教授,主要研究方向为离散事件动态系统的优化与控制, 自动制造系统的无死锁调度, 复杂度分析,Petri网。近五年来发表论文10篇, 其中第一作者SCI收录3篇, EI收录4篇, 作为主要人员承担国家自然科学基金2项。现主持国家自然科学基金青年项目1项,“基于资源变迁回路的柔性制造系统死锁控制方法研究(61304052)”;主持山东省优秀中青年科学家科研奖励基金一项,“自动制造系统死锁控制优化方法研究”(BS2013DX005)。
五、项目取得的专利清单(已授权和已受理的)
1.费敏锐,周文举,周晓兵,杜大军,王海宽,一种基于机器视觉对瓶盖表面瑕疵的智能检测方法,中国,ZL201110048984.7,2012.8.8。
2.王海宽,方俊,费敏锐,钱世俊,周文举,一种自适应调色调光机器视觉光源检测装置及方法,中国,ZL201310225001.1,2015.7.29。